
你是否遇過明明已經使用硬體方法解決干擾問題了,但軟體在判斷開關類的訊號時始終還是有誤判的狀況呢?
前言
上一篇我們聊到,在 GPIO 腳位和 GND 之間並聯一顆 0.1µF 的陶瓷電容,這個成本不到 1 塊錢的「低通濾波器」,就能擋掉大部分高頻雜訊。
照理說這樣軟體面就能使用乾淨的雜訊,但其實還有來自元件本身的物理現象「機械彈跳 (Mechanical Bouncing)」,這物理性的抖動得靠軟體來解決。
這篇就來帶你認識什麼是「彈跳」,並用幾種不同的 Debounce 演算法,從入門到進階,消除惱人抖動訊號。
什麼是「彈跳 (Bouncing)」?
從物理結構看彈跳
身為一個軟體工程師,我們常面對的不是 true 就是 false,沒有第三種選項,一個指令一個動作。但硬體就不是這麼單純的 0 或 1,「按下去」這個動作,從物理角度來看是很動感的。
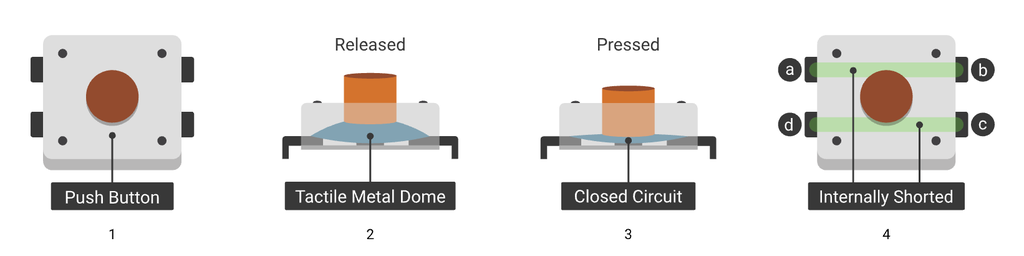
拿常見的按鈕開關來說,他的內部就是用兩片金屬彈片組成,當你按下去時,兩片金屬片會接觸導通。
舉個例子,你可以把按下去的過程想像成是「把一顆籃球砸向地板」,它會因為彈性而來回彈跳好幾次才停下來。
按鈕裡的金屬彈片也是一樣。在你按下的幾毫秒 (ms) 內,它們會以極快的速度互相碰撞、分開、再碰撞、再分開,直到最後才穩定地接觸在一起。
這個「彈跳」的過程,對人體來說根本無法察覺,但對樹莓派的 GPIO 來說,它的反應速度快到足以捕捉到每一次微小的碰撞。所以一次的按壓,在它眼裡就變成了好幾次的快速開關。
從電子訊號看彈跳
既然我們知道按鈕內部會像籃球一樣彈跳,那這些物理上的「彈跳」,在電路上會怎麼呈現,又會怎麼被樹莓派 GPIO 讀到呢?
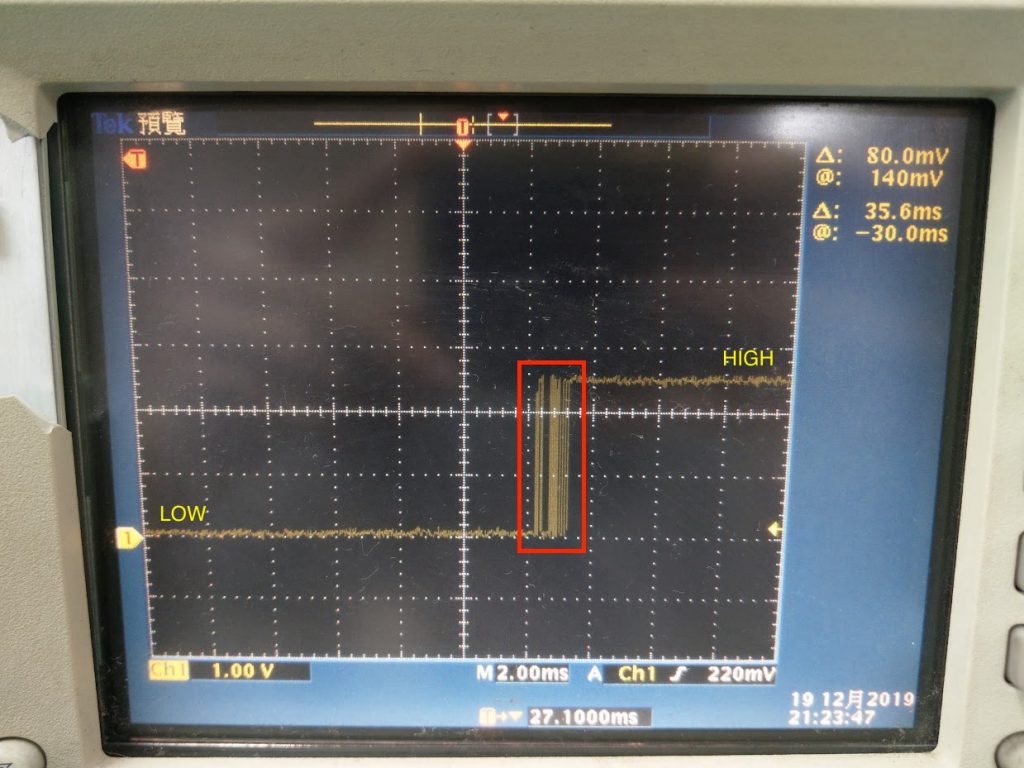
如底下圖片紅框處,那就是彈跳的訊號,會在 HIGH 與 LOW 之間來回快速跳動,最後才會穩定在 HIGH 訊號。
如果你寫得程式是「只要偵測到 HIGH 就執行一次動作」,那恭喜你一次的按鈕按壓,你的動作可能就會被執行無數次。
這就像你只點擊了一下滑鼠,結果電腦卻幫你點了三四下,是不是很惱人?這就是「彈跳」在電子訊號層面帶來的實際困擾。
軟體解彈跳 (Debounce) 的三種方法
方法一:【入門】簡單延遲法
這是最直覺的做法,在收到 HIGH 訊號時,直接先等個 50 毫秒 (ms),然後再確認狀態是不是真的改變了,如果兩次的狀態都一樣,那代表彈跳的狀態已過去。
但是這個方法最致命的缺點是在等待的這個期間 (50 ms),你的程式會被「凍結」,什麼事情都做不了,只能等待時間過了才能繼續處理。
對於簡單的專案來說夠用,但是如果你的執行緒上有很多事情要處理,像是讀取感測器、更新顯示器、處理網路通訊等等,那這個方法會讓整個程式在有訊號進來時卡卡的。
適用情境:
- 只有單一按鈕,沒有其他複雜任務
- 學習 Debounce 概念的入門練習
- 對即時性要求不高的簡單專案
// ========== 簡單延遲法 (Simple Delay) ==========
// ========== 變數宣告 ==========
buttonPin = 1
lastStableState = LOW // 上一次穩定的狀態 (初始為放開)
// ========== 主程式迴圈 ==========
LOOP:
// 1. 讀取當前按鈕狀態
currentState = digitalRead(buttonPin)
// 2. 檢查狀態是否改變
IF currentState != lastStableState THEN
// 3. 偵測到變化,直接阻塞等待
delay(50) // == 阻塞 50ms,期間無法做任何事 ==
// 4. 重新讀取按鈕狀態 (二次確認)
confirmedState = digitalRead(buttonPin)
// 5. 確認狀態真的改變了 (不是抖動)
IF confirmedState != lastStableState THEN
// 6. 更新穩定狀態
lastStableState = confirmedState
// 7. 判斷是按下還是放開
IF lastStableState == HIGH THEN
PRINT "按鈕被按下!"
// 在此執行按鈕按下的邏輯
ELSE
PRINT "按鈕被放開!"
// 在此執行按鈕放開的邏輯
END IF
END IF
// ELSE: 是抖動,忽略此次變化
END IF
// 8. 短暫延遲避免過度耗用 CPU (可選)
delay(1)
GOTO LOOP
END LOOP方法二:【進階】狀態機計時法
這個方法的核心概念是「非阻塞式 (Non-blocking)」設計。不像方法一會傻傻地等 50ms,這個方法會在狀態改變時記錄「狀態改變的時間」,然後在每次迴圈中檢查:「從上次改變到現在,過了 50ms 了嗎?」
如果時間到了而且狀態真的穩定了,那就確認這是一次有效的按鈕動作。如果時間還沒到,或是狀態又變了(代表還在彈跳),那就繼續等待。重點就是在等待的過程中,你的程式可以繼續做其他事情不會被卡住。
這個方法在實務上很常用,因為它在準確性和效能之間取得了很好的平衡。而且程式碼也不會太複雜,容易維護和理解。
適用情境:
- 需要同時處理多個任務的專案
- 有多個按鈕需要監控
- 對即時性有一定要求的應用
// ========== 變數宣告 ==========
buttonPin = 1
currentState = LOW // 當前按鈕狀態
lastStableState = LOW // 上一次穩定的狀態 (初始為放開)
lastDebounceTime = 0 // 上一次狀態改變的時間戳記
debounceDelay = 50 // 防彈跳延遲閾值 (毫秒)
// ========== 主程式迴圈 ==========
LOOP:
// 1. 讀取當前按鈕的原始狀態
reading = digitalRead(buttonPin)
// 2. 檢查是否有狀態變化(可能是雜訊或真實按下/放開)
IF reading != currentState THEN
// 狀態改變了,重置計時器
lastDebounceTime = getCurrentTime()
currentState = reading
END IF
// 3. 檢查當前狀態是否已穩定超過閾值時間
IF (getCurrentTime() - lastDebounceTime) > debounceDelay THEN
// 4. 狀態已穩定,檢查是否與上次穩定狀態不同
IF currentState != lastStableState THEN
// 5. 確認為有效的狀態變化
lastStableState = currentState
// 6. 判斷是按下還是放開
IF lastStableState == HIGH THEN
PRINT "按鈕被按下!"
// 在此執行按鈕按下的邏輯
ELSE
PRINT "按鈕被放開!"
// 在此執行按鈕放開的邏輯
END IF
END IF
END IF
// 7. 執行其他非阻塞任務
doOtherTasks()
// 8. 短暫延遲(可選,避免過度耗用 CPU)
delay(1) // 例如 1ms
GOTO LOOP
END LOOP
// ========== 輔助函數 ==========
FUNCTION getCurrentTime():
RETURN 當前系統時間(毫秒)
END FUNCTION
FUNCTION doOtherTasks():
// 在這裡執行其他需要持續運行的任務
// 例如:更新顯示、處理通訊、檢查感測器等
END FUNCTION方法三:【高階】善用中斷機制
中斷 (Interrupt) 是一個強大的機制,它讓硬體在特定事件發生時(例如按鈕被按下),自動通知 CPU 暫停手邊的工作,先去執行對應的處理程式(中斷服務常式,ISR),處理完再回來繼續原本的工作。
但是,中斷程式它會在「任何時候」被觸發,這代表如果按鈕彈跳造成多次觸發,中斷程式就會被執行多次,所以我們還是要在中斷程式內部做 Debounce 檢查。
方法就是記錄「上一次觸發中斷的時間」,如果這次觸發距離上次不到 50ms,那就直接忽略(因為很可能是彈跳)。只有間隔夠長的觸發,才是真正的按鈕按壓。
這個方法的優點是效能最好,CPU 不用一直輪詢按鈕狀態,平時可以專心做其他事情或進入省電模式。但缺點是程式碼稍微複雜一點,而且要注意中斷程式的執行時間不能太長,否則會影響整個系統的運作。
適用情境:
- 對效能和省電有高度要求的專案
- 按鈕事件發生頻率較低
- 需要最快的反應速度(微秒等級)
注意事項:
- 中斷服務常式 (ISR) 內部不要執行太複雜或太耗時的操作
- 不要在 ISR 內使用會阻塞的函數(如 delay)
- Debounce 延遲時間可以根據實際按鈕特性調整(通常 50~300ms)
// ========== 變數宣告 ==========
buttonPin = 1 // GPIO 腳位
last_trigger_time = 0 // 上一次觸發時間
DEBOUNCE_TIME = 50 // 防彈跳延遲閾值 (毫秒)
// ========== 初始化 ==========
設定 buttonPin 為輸入模式
啟用 buttonPin 的下拉電阻
註冊中斷:當 buttonPin 偵測到上升緣時,執行 button_pressed_ISR
// ========== 主程式迴圈 ==========
LOOP:
PRINT "執行其他任務..."
延遲 2 秒
GOTO LOOP
END LOOP
// ========== 中斷服務常式 ==========
FUNCTION button_pressed_ISR():
current_time = getCurrentTime() // 取得目前時間(毫秒)
// 防彈跳檢查
IF (current_time - last_trigger_time) < DEBOUNCE_TIME THEN
RETURN // 忽略此次觸發
END IF
// 更新最後觸發時間
last_trigger_time = current_time
// 執行按鈕按下的動作
PRINT "按鈕被按下!"
// 在此執行其他邏輯
// == 按鈕確定被按下時,會執行到這裡! ==
END FUNCTION
// ========== 輔助函數 ==========
FUNCTION getCurrentTime():
RETURN 當前系統時間(毫秒)
END FUNCTION| 方法 | 優點 | 缺點 | 適用情境 |
|---|---|---|---|
| 簡單延遲法 | 容易理解、程式碼簡單 | 會阻塞程式執行,無法處理其他任務 | 簡單專案、學習用途 |
| 狀態機計時法 | 非阻塞、可同時處理多任務、準確度高 | 需要持續輪詢,CPU 使用率較高 | 多任務專案、多按鈕監控 |
| 中斷驅動法 | 效能最佳、省電、反應速度快 | 程式較複雜、需注意 ISR 執行時間 | 對效能要求高的專案 |
選擇哪種方法,取決於你的專案需求。如果只是做個簡單的開關燈專案,方法一就夠用了。但如果你在做智慧家居系統,需要同時監控多個感測器和按鈕,那方法二或方法三會是更好的選擇。
總結
在上一篇硬體篇中,我們學會了用 0.1µF 的電容來擋掉高頻雜訊,從電路層面解決了大部分的干擾問題。但就算硬體濾波做得再好,還是有個按鈕本身的物理現象「機械彈跳」躲不掉。
這篇文章帶你認識了彈跳的成因,以及三種軟體解彈跳的方法:簡單延遲法適合入門練習、狀態機計時法是實務上的平衡方案、中斷驅動法則是追求極致效能的選擇。
記住,沒有哪種方法是絕對最好的,重點是根據你的專案需求來選擇。如果只是簡單的按鈕控制 LED,方法一就夠用了;但如果要同時處理多個任務,那就考慮方法二或方法三吧。
現在,結合硬體篇的 RC 濾波電路和這篇的軟體 Debounce 演算法,你的 GPIO 訊號品質應該已經相當乾淨穩定了。下次再遇到按鈕誤判或訊號亂跳的問題,就知道該從哪裡下手了。
相關文章: